
TechNoam、アダワープジャパンと共同でJID 2025に出展― PLATEAUを活用したAutoware自動運転シミュレーション技術を公開
リリース発行企業:TechNoam株式会社
情報提供:

空間コンピューティング技術開発を行うTechNoam株式会社(代表取締役 園田 康記)とアダワープジャパン株式会社(代表取締役 安谷屋 樹)は、2025年2月28日に開催された「JID 2025 by ASCII STARTUP」に共同出展しました。本展示において、国土交通省が推進する3D都市モデル整備プロジェクト「PLATEAU」のデータと、自動運転オープンソースソフトウェア「Autoware」を活用した自動運転シミュレーション技術を披露しました。
また、本イベント内のピッチ企画「PLATEAU STARTUP Pitch 03」では、アダワープジャパン代表の安谷屋が登壇し、自動運転シミュレーションの未来について発表を行いました。
概要
開催日: 2025年2月28日
展示会名: JID 2025 by ASCII STARTUP
開催場所: ベルサール汐留
出展ブース:「PLATEAU Autoware Simulator」
展示技術:3D年モデルを活用した自動運転シミュレーション
登壇時の様子。アダワープジャパン代表の安谷屋がPLATEAU STARTUP Pitch 03で登壇し、自動運転シミュレーションの未来について発表した。
出展の詳細
1. 3D都市モデルを用いた自動運転シミュレーション
PLATEAUのLOD2データを活用し、実際の都市空間を忠実に再現。Autowareを活用した自動運転技術の検証を効率的に行う方法を提示。
2. 高精度な都市設備マップの構築
TechNoamと連携し、短期間かつ低コストでLOD3レベルの都市モデルを構築。オフショア拠点を活用することで高額・長期化しがちな3Dモデリング作業も大幅に省力化。
3. リアルタイムシミュレーションデモ
Sonyの空間再現ディスプレイ上で、PLATEAUモデル内を走行する車両の動作をリアルタイムに可視化。

TechNoamが開発する空間再現ディスプレイ用アプリにて、PLATEAUモデルの中を走行する車両を展示。
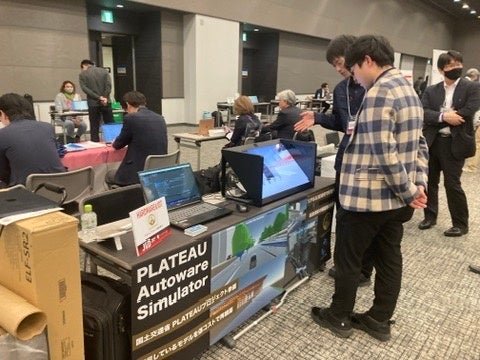
PLATEAU上で自動運転車両の走行シミュレーションのデモ体験会を行った。
技術革新のポイント
自動運転の物理テストにかかるコスト、検証期間を大幅に短縮
高精度な3Dモデル上でのシミュレーションを行うことで、テスト数や検証期間を最適化。実車検証や車両運搬にかかる多大な費用を抑えることで開発スピードが加速。
事故再現・リスク評価への応用が可能
交通渋滞や悪天候など複雑なシナリオを仮想空間で再現することで、事故状況の分析や将来のリスク評価に活用。多角的な検証を進めることで自動運転システムの安全性の向上に貢献。
高精度かつ安価なシミュレーション環境を実現
PLATEAUやAutowareを活用することで高精度なシミュレーション環境を安価に再現。実際の都市空間に近いシミュレーション環境を活用することが可能。
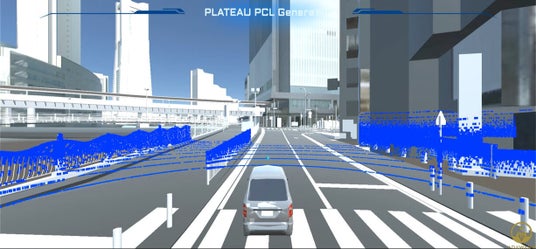
仮想の3D都市空間上で自動運転シナリオを再現した例。複雑な交通状況や環境条件を設定し、安全性検証を行う。
アダワープジャパンとの協業ポイントアダワープジャパンはAutowareを用いた自動運転・シミュレーション開発技術を有しており、TechNoamとアダワープジャパンの協業により実世界に近い複雑な交通シナリオや環境条件を再現できる検証プラットフォームを構築しています。開発プロセスの迅速化と安全性の向上が実現され、将来的な自動運転システムの実用化に向けた重要な検証環境が整備可能です。

左: TechNoam(園田)、右: アダワープジャパン(安谷屋)

TechNoamの制作するLOD3相当のモデル
各代表のコメント
アダワープジャパン株式会社 代表取締役 安谷屋 樹
自動運転を社会実装するには、豊富な人材と十分なテスト環境が欠かせません。しかし、その確保にはコストも時間もかかるのが現実です。我々はPLATEAUやAutowareなどのオープンソースを基盤に、TechNoamのモデリング技術を組み合わせることで、安全かつ効率的なシミュレーション環境を構築しました。今後も、シミレーション技術の進化に合わせて、自動運転技術の発展を後押ししてまいります。

TechNoam株式会社 代表取締役 園田 康記
当社は、ベトナム拠点を活用したオフショア開発によって、都市モデルの3D化をより迅速かつ高精度に提供しています。特に高速道路などの広域インフラ分野で培った技術力と実績を活かし、PLATEAUプロジェクトをベースに、自動運転シミュレーションに最適な環境を構築しました。今後もアダワープジャパンとの協力を深め、3D都市モデルの活用による自動運転技術の社会実装を加速させていきます。

今後の展望
シミュレーションのさらなる高度化:
天候、歩行者、交通量などの動的要素を加え、実車テストに近い検証環境を実現。
実証実験とパートナー連携:
他社や研究機関との連携を強化し、様々な自治体・地域での運用検証を拡大。
研究開発の加速支援:
シミュレーションプラットフォームをよりオープン化し、業界全体の自動運転技術進歩を促進。
LLMの活用:
・歩行者/自転車等は、LLMを活用したAIエージェントとしてシミュレーションし、さまざまなシナリオにおいて予測困難な動きにも柔軟に対応できるようにする計画。
問い合わせ・デモ予約
アダワープジャパン株式会社: 安谷屋 樹
メール: t.adaniya[@]adawarp.com
TechNoam株式会社: 園田 康記
メール: koki.sonoda[@]tech-noam.com
最新ニュース






食べる



暮らす・働く




買う



見る・遊ぶ







みん経トピックス
プレスリリース/東京都















